回転座標系の運動方程式
概要
慣性の法則が成り立つ座標系である慣性系に対して、加速度
では、慣性系に対して回転移動している座標系(回転座標系) から物体の運動を考察した場合、どのような慣性力がはたらくのだろうか。そりゃ遠心力でしょ、と思う方も多いかもしれないが、実はもう一つ慣性力が存在する。それを、回転座標系の運動方程式を立てることで調べよう。
ここではとりあえず2次元の運動を考えるが、3次元でも同様に考えることができる(大学で学ぶ)。
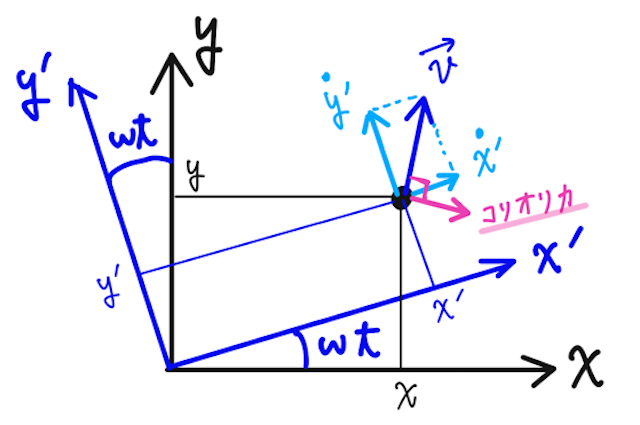
原点
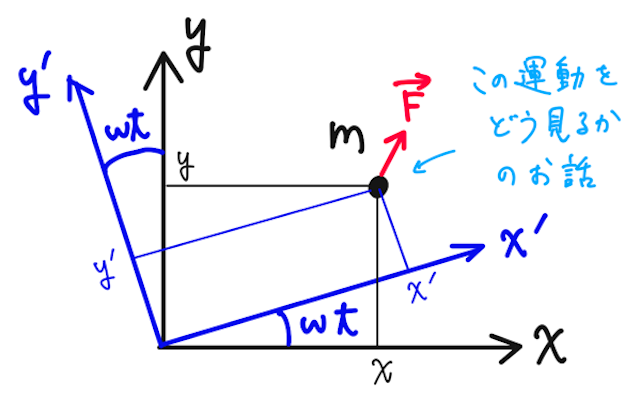
慣性系で、質量
で表される。(ドットは見たことない方も多いと思うが、画面の汚れや折れたシャー芯ではなく、時間微分を表す。2つ付いていたら時間での2階微分。)
このとき、回転座標系
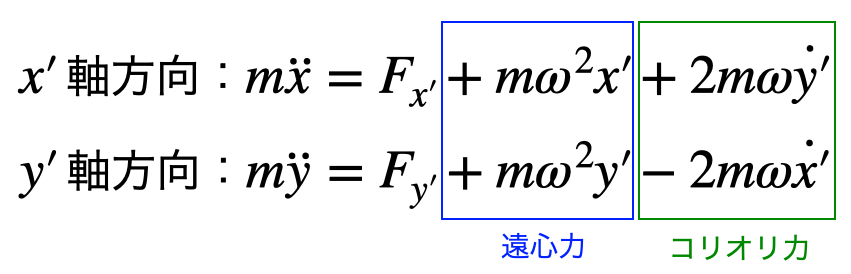
と表せる。この式の証明は、ややこしいので動画で学ぶことをオススメする。CSS高校物理さんの動画や、ヨビノリさんの動画(ベクトルのまま証明されていて、やや発展的)がオススメ。
ここでは、この運動方程式の形を理解することが大事で、これは、真の力
- 遠心力
- コリオリ力
で表されることを意味している。(よくコリコリ力と書いてしまうので、気をつけよう)
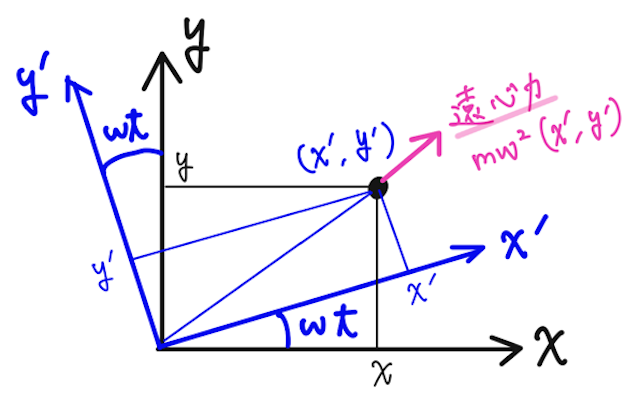
また、力の向きも大切で、遠心力は、
と表されるので、遠心力の向きは回転座標系の位置ベクトル
また、コリオリ力は、
であることから、力の向きは回転座標系での質点の速度に垂直で、進行方向に向かって右向きにはたらくことがわかる。(例えば、
等速円運動との関係
質点が、半径
となるので、真の力以外に、見かけの力として遠心力
この用語を含むファイル
関連動画